- HOME
- DOBOT協働ロボットの特長と導入メリット | 最先端技術で生産性を向上
- ヒューマノイドロボット(人型ロボット) ATOM
ヒューマノイドロボット(人型ロボット) ATOM
ヒューマノイドロボット(人型ロボット)
汎用性と高度な知性を備えた、実世界で活躍する次世代AIヒューマノイド
DOBOT ATOMとは?
DOBOT ATOMは、人間に学び、人間と協調することを目的に開発された 次世代ヒューマノイドロボットです。最先端のAI技術を搭載し、 工業用途から教育・研究まで幅広く対応可能です。
ヒューマノイドロボットATOM 動画
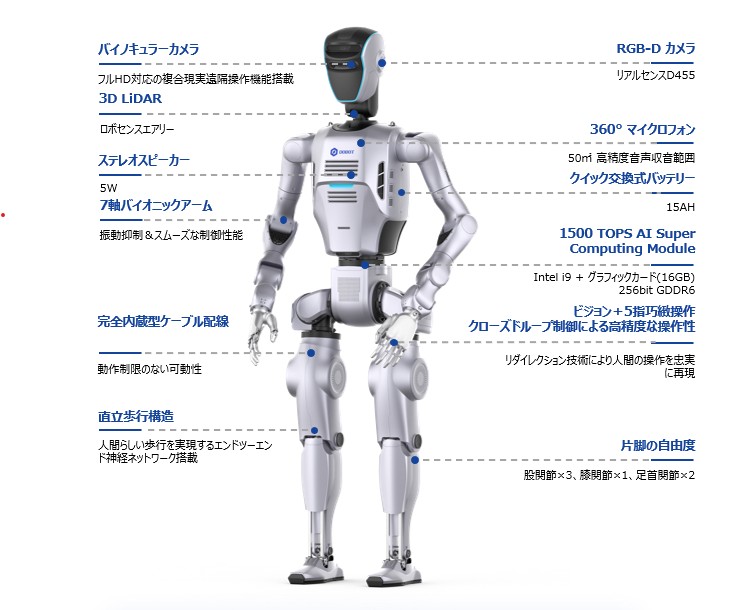
ヒューマノイドロボットATOM 特徴
ATOMは直立歩行する足タイプ(ATOM D / ATOM MAX)と、車輪走行のAMRタイプ(ATOM W)をラインナップ。全モデル共通の機能と、タイプ別の専用機能を分けてご紹介します。
・7軸バイオニックアームと独自の揺れ抑制技術で、繰り返し精度±0.05mm・片腕定格3.5kgの精密組立に対応。
・力制御によるスムーズでコンプライアントな動作で、工具の使用や繊細な作業も実現。
・VLA(Vision-Language-Action)アーキテクチャで、エンドツーエンドの自律的な推論と操作が可能。
・教育・研究・サービス業・産業など多様な業務シーンで活用可能。
・360°音源定位マイクとステレオスピーカーにより、人間や他のロボットとのシームレスな連携を実現。
・二次開発支援SDKに対応。データ管理・可視化用のコンパニオンアプリも提供。
・クイック交換式バッテリーパックで容易な交換、ダウンタイムを最小化。
・関節アセンブリのアクチュエータ中空位置合わせ構造を採用。
・高機能センサー:深度カメラ・両眼カメラ等で豊かなインタラクションを実現(搭載状況はモデルにより異なります)。
・ATOM MAXは最大歩行速度1.5m/sに対応し、人間の生活空間や産業環境に適応。
・ATOM D(高さ650mm/全身16自由度):卓上・研究向け上半身モデル。1500 TOPSモジュールや手首・ヘッドFLiDAR等はオプション。
・500mmの狭い通路も通過可能。複雑で多様な産業環境に適応する設計。
・45Ahバッテリーと、Intel i9(24コア32スレッド)+ディスクリートGPU(41.15 TFLOPS)のオフボード演算モジュールを搭載。
・本体寸法:約1785mm(高さ)×500mm(幅)×500mm(奥行)。
ヒューマノイドロボットATOM モデル一覧
| 項目 | ATOM-Max 足タイプ/全身モデル |
ATOM-D(Data Collection) 足タイプ/上半身モデル |
ATOM-W AMRタイプ/車輪走行 |
|---|---|---|---|
| 身長/本体高さ | 約 1650 mm | 約 650 mm | 約 1785 mm |
| 重量 | 約 58 kg | 約 26 kg | ― |
| 全身自由度(器用手を除く) | 29 | 16 | 20 ※ |
| 頭部自由度 | 2 | 2 | 2 |
| 単腕自由度 | 7 | 7 | 7 ×2 |
| 腰部自由度 | 1 | 0 | 4 |
| 単脚自由度 | 6 | 0 | ―(車輪走行) |
| 移動方式 | 二足歩行(直膝/屈膝歩行対応) | ―(下半身なし) | 車輪走行(AMR・LiDARナビ) |
| 臂展(リーチ/アームスパン) | 600 mm | 600 mm | 600 mm |
| 単腕ペイロード(定格) | 3.5 kg | 3.5 kg | 3.5 kg |
| 単腕繰り返し精度 | ±0.05 mm | ±0.05 mm | ±0.05 mm |
| 最大腕先端速度 | 1.5 m/s | 1.5 m/s | ― |
| 最大移動速度 | 1.5 m/s(歩行) | ― | 1.5 m/秒(シャーシ) |
| 走行位置決め精度 | ― | ― | ±10 mm(中心点間精度) |
| 末端エフェクタ(ハンド) | 6自由度 五指ハンド × 2 | 五指ハンド構成(オプション) でデータ収集 |
6自由度 デクステラスハンド (オプション) |
| 頭部センサ | 深度カメラ × 1 高解像度双眼カメラ × 1 |
深度カメラ × 1 高解像度双眼カメラ × 1 |
深度カメラ × 1 高解像度双眼カメラ × 1 |
| 手首センサ | 深度カメラ × 2 | ― | 深度カメラ × 2(オプション) |
| 腰部センサ | 深度カメラ × 2 | ― | 深度カメラ × 2(オプション) |
| 力覚センサ | ― | ― | エンドエフェクター6軸力覚 センサー(オプション) |
| 頭部LiDAR | 3D LiDAR × 1 | ― | LiDARナビゲーション |
| オーディオ機器 | 360°マイク × 1 磁石付きスピーカー × 2 |
― | 360°ピックアップマイク × 1 キャリブレートスピーカー × 2 |
| 計算ユニット(基本) | Intel i5 ベース | Intel i5(上半身制御用) | オンデバイスAIコンピューティング |
| 高算力モジュール | 1500 TOPS 相当 Intel i9+大容量GPU(標準) |
オプション(外部PC等と連携) | オフボード演算モジュール Intel i9+GPU 41.15 TFLOPS |
| バッテリー | 駆動 約 2 時間 | 駆動 約 2 時間 | 45 Ah |
| 充電時間 | 約 1 時間 | 電源接続 | ― |
| 本体寸法(W×D) | ― | ― | 500 mm × 500 mm |
| SDK対応 | 対応済 | 対応済 | 二次開発支援SDK |
| 主な用途 | 現場実装・自律作業・PoC | 動作データ収集・模倣学習用 データセット構築 |
産業現場での自律搬送・ 可動範囲を伴う作業 |
※ ATOM-Wの全身自由度は仕様表の「全自由度(器用手を除く)20」に基づきます。製品本文では上肢32自由度との記載もあり、表記が混在しているため確認中です。
※ 「―」は該当機能なし、または非搭載を示します。オプション項目はカタログ準拠です。仕様は変更される場合があります。
Atom - Max
DOBOT Atom Max は、先進的なロボット研究や産業応用を目的に設計された、41自由度(DoF)を持つ最先端のヒューマノイドロボットです。
12自由度の器用なハンド、60FPS フルHDビジョンシステム、Intel RealSense D455 深度カメラを搭載し、高度な操作と視覚認識を実現します。オプションの Embodied AI セットでは、高精度 URDF モデル、オープンソースのトレーニングフレームワーク、マルチモーダルデータツールが提供され、研究開発を加速します。
さらに、VR/MR 遠隔操作に対応し、マーカーレストラッキングと全身/部分のデュアル制御モードを搭載。すべては 1500 TOPS AI モジュールによって駆動され、リアルタイムエッジコンピューティングを実現します。
サブミリメートル精度と 360° の環境認識機能により、精密組立から動的歩行研究まで幅広いタスクを支援。AIロボティクスの革新における参入障壁を大幅に低減し、最前線の研究・開発現場に貢献します。
同梱品
| 内容 | 数量 |
|---|---|
| Dobot Atom – Max(バッテリー付き) | 1 |
| バッテリー充電器 | 1 |
| ユーザーマニュアル | 1 |
| リモコン | 1 |
| 開発用ドキュメントセット | 1 |
| 6自由度器用ハンド | 2 |
オプション
| 内容 | 数量 |
|---|---|
| バッテリーパック | 1 |
| バッテリー充電器 | 1 |
| リフター | 1 |
| ベースオペレーションモデル+トレーニング用プロップキット+チュートリアル | 1 |
| テレオペレーションキット | 1 |
| エンボディドAIデータツールチェーン | 1 |
Atom - Data Collection
DOBOT Atom(データ収集バージョン)は、大規模なデータ収集タスクに最適化されたモデルです。 7自由度の両腕と2自由度の頭部を備え、器用ハンド/アダプティブグリッパー、手首カメラなど エンドエフェクタを用途に合わせてカスタマイズできます。
Intel RealSense D455(最大約6m)と60fpsフルHDステレオカメラを搭載し、 VR/MR利用時の酔いを抑えつつ高画質な映像取得が可能です。
さらにEthernet接続に対応し、外部システムとの連携によるデータ収集・処理を効率化します。
同梱品
| 内容 | 数量 |
|---|---|
| Dobot Atom D(データ収集版・バッテリーなし) | 1 |
| 充電器 | 1 |
| ユーザーマニュアル | 1 |
オプション
| 内容 | 数量 |
|---|---|
| バッテリーパック | 1 |
| バッテリー充電器 | 1 |
| 6自由度器用ハンド | 2 |
| 2指アダプティブグリッパー | 2 |
| 手首装着型RGB-Dカメラ | 2 |
| 移動ベース | 1 |

Atom - W
DOBOT Atom-W(車輪型ヒューマノイドロボット)は、実世界での産業用性能のために設計されたAIエンボディッド・ロボティクスです。7自由度のバイオニックデュアルアームにより±0.05mmの精度(可搬重量比0.5以上)を実現し、力制御による精密組立のためのスムーズでコンプライアントな操作が可能です。32自由度の上肢で忠実な人体運動マッピングを実現します。
車輪駆動の自律移動ベースにLiDARナビゲーションを採用し、位置決め繰り返し精度±10mmで正確なナビゲーションを実現。500mmの狭い通路も通過可能で、複雑で多様な産業環境に適応します。
卓越したオンデバイスAIコンピューティング能力に加え、業界知識グラフとカスタマイズ可能な対話ペルソナをサポートする統合された大規模言語モデルを搭載。VLAアーキテクチャにより、エンドツーエンドの自律的な推論と操作が可能です。没入型VRデータ収集スイートと具現化されたデータツールチェーンにより、継続的な自己進化をサポートします。
同梱品
| 内容 | 数量 |
|---|---|
| Dobot Atom-W(本体) | 1 |
| バッテリー(45Ah) | 1 |
| 充電器 | 1 |
| ユーザーマニュアル | 1 |
オプション
| 内容 | 数量 |
|---|---|
| 6自由度デクステラスハンド | 2 |
| 手首装着型RGB-Dカメラ(ハンドビジョン) | 2 |
| ウエスト装着型RGB-Dカメラ(ウエストビジョン) | 2 |
| エンドエフェクター6軸力覚センサー | 2 |
| オフボード・コンピューティングモジュール(Intel i9+GPU) | 1 |
| 具現化データ収集キット(VRデータ収集スイート) | 1 |
| プリインストールモデル(エンベディッドマニピュレーションVLA) | 1 |

ヒューマノイドロボットATOM 活用シーン
活用シーン - DOBOT ATOMが拓く未来
産業から日常まで。Dobot Atomの無限の可能性
Dobot Atomは、その汎用性と高度な能力により、これまで自動化が困難だった様々な分野での活躍が期待されています。
- 製造業: 自動車部品の組み立て、不定形物のピッキング、品質検査
- 物流・倉庫: 商品の仕分け、棚入れ・棚出し、搬送
- 食品・飲料: 調理補助、配膳、飲料の準備
- 新小売: 接客、商品陳列、在庫管理
- 教育・研究: AI、ロボティクス研究プラットフォーム、プログラミング教育
- 医療・福祉: 薬局業務補助、生活支援
ATOMに関する資料請求・見積・お問い合わせはこちら
ヒューマノイドロボットATOM GitHub情報
DOBOT ATOM 公式GitHub(ROS2 / SDK / URDF)
ATOMの開発・検証に役立つ公式リポジトリを、用途別にまとめています。目的に合わせて選んでください。
ヒューマノイドロボットATOM 各種資料
ヒューマノイドロボットATOM Quick Start guideダウンロード
ヒューマノイドロボット ATOMのQuick Start guideのダウンロードになります。
以下よりダウンロード可能です。

ヒューマノイドロボットATOM Teleoperation_User_Guideダウンロード
ヒューマノイドロボット ATOMのTeleoperation_User_Guideのダウンロードになります。
以下よりダウンロード可能です。