CRシリーズ
【重要なお知らせ】
DOBOT CRシリーズは、2025年12月31日をもって販売終了となります。
新規導入をご検討中のお客様は、お早めにお問い合わせください。
なお、後継機種としてCRAシリーズをご用意しております。
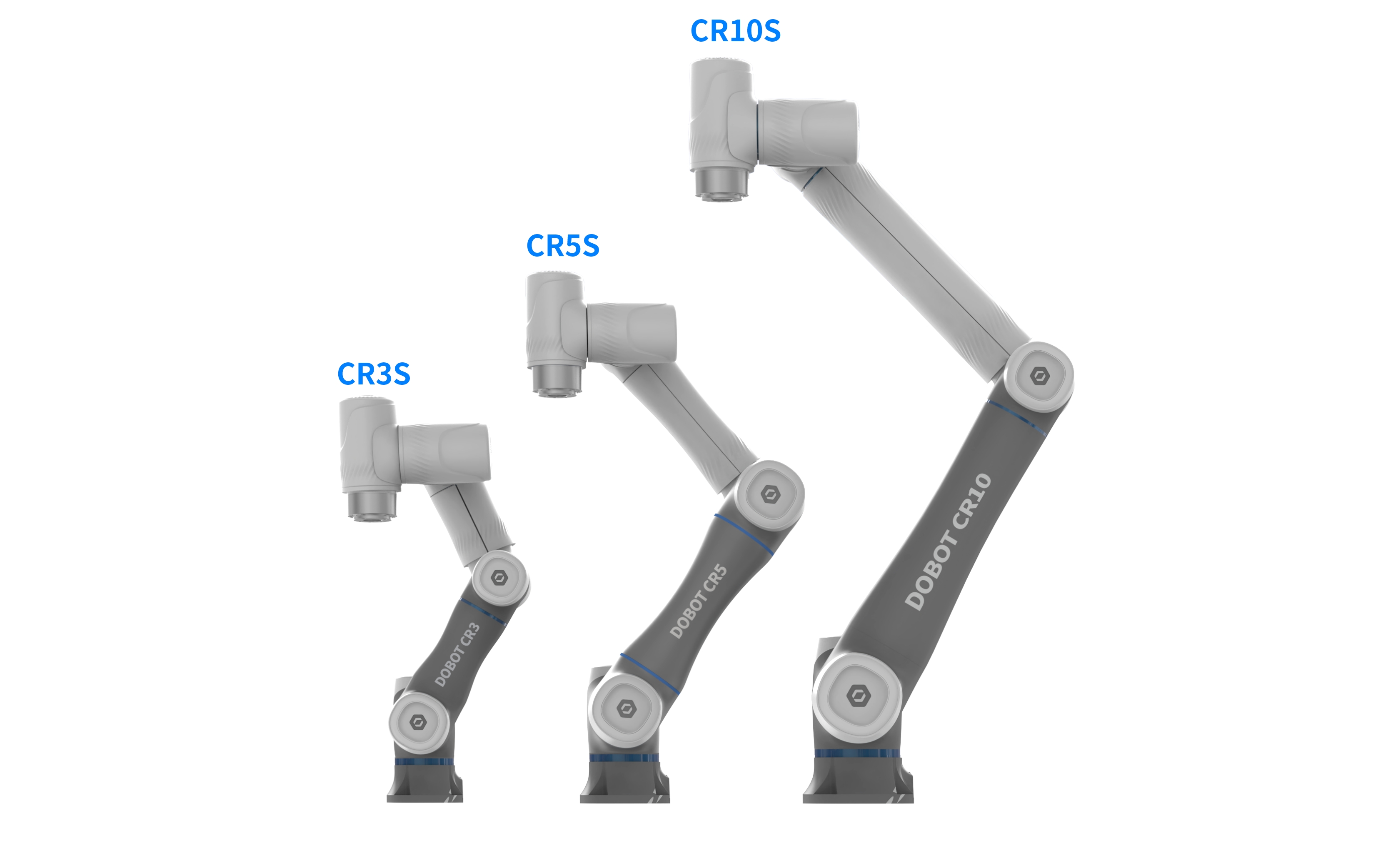
DOBOT CR
6軸協働ロボット
(3Kg〜16Kg)
DOBOT CRは、6つの可搬重量のタイプで構成されています。3kg、5kg、7kg、10kg、12kg、16kgの6種類で、繰り返し精度は±0.02mmです。 人間との共同作業にも安全で、使いやすく、柔軟でシンプルな配置が可能なため、自動車、家電、半導体、ヘルスケア、化学、新規小売など、 幅広い産業で活躍します。
CRは、生産効率を高めながら、人件費の削減を実現します。

コストパフォーマンス
国産協働ロボットと比較して、費用を抑えて導入できます。
安全
非接触検知機能「セーフスキン」(※オプション)でぶつかる前に停止。人との協働作業での衝突を回避します。
DOBOT 説明動画
DOBOT CR を選ぶ理由・特徴
DOBOT(ドゥボット)は、低価格・安全・高機能・汎用性を実現した自己学習型協働ロボットです。
DOBOT CR(産業用協働ロボット)には以下の特徴があります。
POINT
1ダイレクトティーチングにより様々な動作の再現可能
POINT
2あらゆるニーズと用途に対応できる製品ラインナップ
POINT
3SafeSkinテクノロジー(オプション)を利用する事により、幅広く安全対策が可能。
POINT
4シンプルな操作方法で簡単な使い勝手
POINT
5簡単設置、セットアップ
POINT
6豊富な周辺機器 DOBOT+
POINT
7様々な言語で二次開発が可能
POINT
8幅広い適用範囲、費用対効果

重量
16.5㎏~40㎏

有効荷重
3㎏~16㎏

最大動作範囲
440mm~1300mm

繰り返し制度
±0.02mm~±0.03mm
ロボット基本構造・製品仕様
 |
 |
 |
 |
 |
 |
|
| 型番 | CR3 | CR5 | CR7 | CR10 | CR12 | CR16 |
| 軸数 | 6 | 6 | 6 | 6 | 6 | 6 |
| 重量 | 16.5㎏ | 25㎏ | 24.5㎏ | 40㎏ | 39.5㎏ | 40㎏ |
| 最大可搬重量 | 3㎏ | 5㎏ | 7㎏ | 10㎏ | 12㎏ | 16㎏ |
| リーチ | 620mm | 900mm | 800mm | 1300mm | 1200mm | 1000mm |
| 位置繰り返し精度 | ±0.02 mm |
±0.02 mm |
±0.02 mm |
±0.03 mm |
±0.03 mm |
±0.03 mm |
| 定格電圧 | DC 48V | |||||
CR共通のロボットコントローラー
ロボット制御盤に複数のI/Oおよび通信インターフェースにより、無限に拡張が可能です。
インターフェース
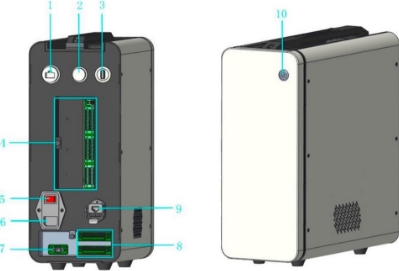
| NO.1 | LANポート |
|---|---|
| NO.2 | 非常停止ボタンポート |
| NO.3 | USBポート |
| NO.4 | I/Oポート(拡張可能) |
| NO.5 | 電源ボタン |
| NO.6 | 電源ポート |
| NO.7 | 外部DC48V電源供給予備ポート (AGV用) |
| NO.8 | システムセキュリティ I/O ポート |
| NO.9 | HDCポート |
| NO.10 | 起動ボタン |


二次開発
20+の開発プラットフォームが対応でき、
ロボットの運用場面が更に広がる。
幅広い適用範囲高費用対効果

パッケージングおよびパレタイジング

ピッキング

艶出し

ねじ締め作業

溶着、塗布、溶接

組み立て

マシンテンディング

CMC

品質検査

射出形成
衝突前検出技術 SafeSkin(オプション)

 セーフスキン対応機種
セーフスキン対応機種フレキシブルで使いやすく

設置が簡単、
すぐに作業開始できる
- 20 分でセットアップ、設置場所を選ばない
- 1 時間で稼働へ
- シンプルデザイン、シンプル配線

ユーザーフレンドリー
自由な操作性
- ダイレクトティーチング
- ボタンを押すだけで、起動レコード、再現が可能
- グリッパーや吸着などを自由に操作

高い投資対効果
と信頼性
- より低いランニングコスト
- 連続稼働時間32000時間
- ISO9001 ISO14001 GB/T29490
- 12カ月保証

様々な端末での
教示が可能になる
- Android、iOS、Windowsをサポートするマルチプラットフォーム制御
ソフトウェア

CR用ソフトウェア
DobotCRStudio
移動端末にてCRロボットを制御できるソフトウェア。
制御プログラミングをグラフィカル化させ、より簡単な使用環境を築ぐ。
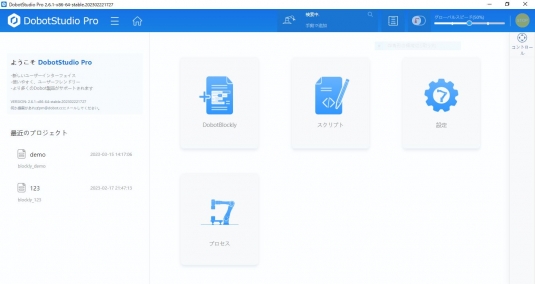
CR用ソフトウェア
DobotStudio PRO
あらゆる機械構造の運動学アルゴリズムと統合された仮想シミュレーション環境が備わっている。
より細かい安全な設定や、二次開発にもサポートする。
動画リンク
DOBOT ラテアート
DOBOT AMR
幅広い適用現場

ローディングとアンローディング

ねじ締め

ねじ締め

段ボール組み立て

検査

部品挿入

3C製造業におけるスマートフォンスクリーンの搬送

ラベル貼り

研磨および艶出し

中国の大手チップメーカーでの
素材フィーディング

コンビニエンスストアでの
サービス提供

コーヒーメーカー
資料ダウンロード

CRシリーズのよくある質問
価格はいくらですか?
価格は公開しておりませんので、詳しくはお問い合わせをお願いいたします。
CRシリーズの現物を見ることできますか?
アスカ株式会社本社では常時CRシリーズを展示しております。
またご希望のお客様に対しては、CR3及びCR5をお持ちしてデモを行う事ができます。
詳しくはお問い合わせをお願いいたします。
日本語マニュアルはありますか?
DOBOT社から日本語マニュアルの提供はあります。
またアスカで購入のお客様に対しては、基本機能を抜粋したオリジナルマニュアルを
提供いたします。
詳しくはお問い合わせをお願いいたします。
製品パラメータ
| 形式番号 | CR3 | CR5 | CR10 | CR16 | |
|---|---|---|---|---|---|
| 重量 | 16.5㎏ | 25㎏ | 40㎏ | 40㎏ | |
| 可搬重量 | 3㎏ | 5㎏ | 10㎏ | 16㎏ | |
| 稼働半径 | 620mm | 900mm | 1300mm | 1000mm | |
| 最大稼働速度 | 2m/s | 3m/s | 4m/s | 3m/s | |
| 繰返し精度 | ±0.02mm | ±0.02mm | ±0.03mm | ±0.03mm | |
| 入力電源 | 100~240VAC, 50/60Hz | ||||
| 通信 | TCP/IP、Modbus、EtherCAT、ワイヤレスネットワーク | ||||
| IP等級 | IP54 | ||||
| 作動温度 | 0~40℃ | ||||
| 標準消費電力 | 120W | 150W | 350W | 350W | |
| 材質 | アルミ合金、ABS樹脂 | ||||
| 関節可動域 | J1 | ±360℃ | ±360℃ | ±360℃ | ±360℃ |
| J2 | ±360℃ | ±360℃ | ±360℃ | ±360℃ | |
| J3 | ±160℃ | ±160℃ | ±160℃ | ±160℃ | |
| J4 | ±360℃ | ±360℃ | ±360℃ | ±360℃ | |
| J5 | ±360℃ | ±360℃ | ±360℃ | ±360℃ | |
| J6 | ±360℃ | ±360℃ | ±360℃ | ±360℃ | |
| 関節最大動作速度 | J1 | 180°/s | 180°/s | 120°/s | 120°/s |
| J2 | 180°/s | 180°/s | 120°/s | 120°/s | |
| J3 | 180°/s | 180°/s | 180°/s | 180°/s | |
| J4 | 180°/s | 180°/s | 180°/s | 180°/s | |
| J5 | 180°/s | 180°/s | 180°/s | 180°/s | |
| J6 | 180°/s | 180°/s | 180°/s | 180°/s | |
各種安全規格

ISO/TS 15066
ISO13849-1
ISO13849-2







